
Quando pensiamo ai robot, la maggior parte di noi immagina qualcosa di fantascientifico o il simpatico robot Pepper apparso negli ultimi anni in occasione di eventi tecnologici. Ma la realtà attuale non è poi così entusiasmante. Molti dei robot industriali presenti oggi sul mercato si concentrano sull’automazione di compiti molto semplici e ripetitivi come l’imballaggio, l’inventario, ecc. Questi robot sono tipicamente pre-programmati / addestrati a svolgere un compito specifico, anche se si tratta di una linea di cooperazione di robot in un’azienda di produzione che assembla un intero prodotto. Un mio amico che era solito addestrare i robot su come saldare lo descriveva come una forma di programmazione visiva in cui al robot viene insegnato a mimare un singolo compito. Usando uno stilo, viene insegnato loro a seguire una serie di coordinate XYZ, come ad esempio dove si trovano le linee di saldatura, quante aree devono essere saldate, mantenendo la giusta temperatura, ecc.
In fin dei conti, questi robot non sono davvero autonomi in quanto vincolati a quel singolo compito. Ciò significa che qualsiasi variabile non considerata potrebbe causare problemi con un robot e causare errori in tutta la catena di montaggio – semplicemente non sono adattabili come gli esseri umani. E se la procedura ha bisogno di essere cambiata per fare qualcos’altro, allora gli operatori/formatori robotici devono essere portati a riqualificare/riconfigurare tutti i robot di quella linea di produzione.
La buona notizia è che stiamo migliorando nel capire come applicare il sistema di visione e l’intelligenza artificiale (AI) della macchina che fa uso dei sensori al software della macchina. In questo modo le macchine saranno in grado di interpretare il mondo circostante e di adattarsi a circostanze diverse da quelle per cui sono state originariamente istruite. Ma la vera intelligenza robotica dipenderà dall’apprendimento bidirezionale, in cui gli apprendimenti rilevati da ogni singolo robot o dispositivo possono essere applicati agli algoritmi principali nel cloud e poi condivisi con tutti i robot di quella categoria. Questi sistemi di robot contestualmente consapevoli saranno interconnessi a sensori IoT, ad altri robot ed ecosistemi digitali per l’elaborazione dei dati AI e la costruzione di modelli. E l’elaborazione di tutti questi dati dipenderà da un’infrastruttura IT distribuita, ibrida e multicloud, con una connettività sicura e a bassa latenza per lo scambio di dati privati.
Rendere i robot più intelligenti attraverso IoT e IA
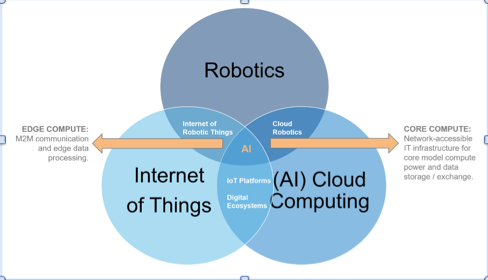
Mentre il campo della robotica può avere un focus diverso rispetto ai domini IoT e IA, è la convergenza di queste tecnologie e delle loro architetture IT di supporto che sta infondendo una maggiore intelligenza nei dispositivi finali – in questo caso i robot. ABI Research ha coniato il termine “Internet of Robotic Things (IoRT)” per descrivere questo tipo di sistema, “dove i dispositivi intelligenti possono monitorare gli eventi, fondere i dati dei sensori da una varietà di fonti, utilizzare ‘intelligenza’ locale e distribuita per determinare una migliore linea d’azione, e poi agire per controllare o manipolare gli oggetti nel mondo fisico”[i]. A differenza di un robot autonomo programmato per svolgere un singolo compito, i sistemi IoRT sono connessi at the edge e nel cloud e possono scambiare dati e insight per adattarsi a situazioni mutevoli in tempo reale.
Il diagramma sottostante illustra gli elementi centrali di un sistema robotizzato connesso. L’IoT è come i cinque sensi umani che percepiscono il mondo, l’IA nel cloud è il cervello che elabora le informazioni e ne dà un senso, e il robot è il corpo fisico che agisce sulla base di queste conoscenze. In alcuni casi, reagiamo senza pensare, come ad esempio non toccare una stufa calda perché il nostro corpo ha già imparato ad associare il dolore a questo. Sarebbe simile alla IoRT, dove i robot fisici hanno già acquisito l’intelligenza necessaria per adattarsi molto rapidamente a certe situazioni. Altre volte, quando incontriamo nuove situazioni, dobbiamo pensare e imparare prima di agire, come ad esempio imparare a fermarsi al semaforo rosso quando si guida un’auto. È qui che entra in gioco la robotica del cloud, che in realtà si occupa di migliorare i modelli principali di intelligenza artificiale nel cloud con le intuizioni raccolte dai robot connessi at the edge o alla IoRT.
 Esempio di apprendimento bidirezionale – robot di delivery
Esempio di apprendimento bidirezionale – robot di delivery
Un esempio di come questo potrebbe funzionare è una flotta di autonomi robot di delivery. Ogni robot di delivery ha i propri sensori e computer IA per il funzionamento e la comunicazione con gli altri robot della flotta e con la piattaforma IoRT a the edge. Con il tempo, può diventare chiaro che una particolare intersezione è un problema per molti dei robot della flotta. Forse il semaforo cambia troppo velocemente e si fermano improvvisamente e lanciano un errore, o lavori stradali non pianificati interrompono il percorso abituale. Tutti i dati intorno a quell’errore, come i feed video trasmessi dai sensori, gli insight dai nodi edge, ecc. vengono inviati agli algoritmi AI nel cloud per addestrarli a riconoscere questi nuovi casi edge e a tenere conto di queste situazioni. Poi quell’algoritmo di IA aggiornato viene rispedito all’intera flotta di robot come aggiornamento software in modo che possano scorrere meglio quell’intersezione andando avanti.
 La bassa latenza è essenziale per l’intelligenza della macchina
La bassa latenza è essenziale per l’intelligenza della macchina
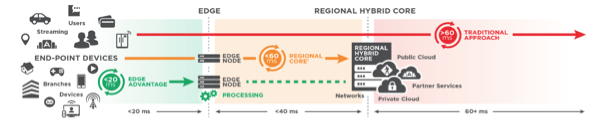
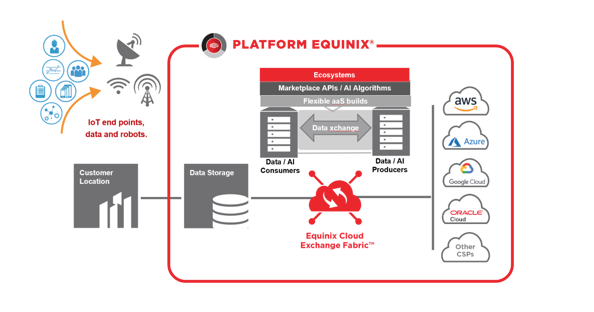
Per questo tipo di apprendimento bidirezionale per lavorare bene, la chiave è la bassa latenza. Le comunicazioni machine-to-machine (M2M) e le interazioni at the edge richiedono meno di 20 millisecondi di latenza. E, pur migliorando i modelli AI nel cloud in grado di tollerare latenze più elevate, l’aggiornamento del software deve essere affidabile e tempestivo per risolvere i problemi e migliorare la precisione. Ciò richiede un’infrastruttura IT distribuita per ridurre la distanza tra i robot e un punto di connettività a una grande larghezza di banda. Le soluzioni di interconnessione neutre per i fornitori, come quelle della Piattaforma Equinix®, possono colmare il divario tra la potenza di calcolo necessaria per i modelli AI nel cloud e la reach necessaria per connettersi privatamente agli ecosistemi digitali per uno scambio di dati sicuro e a bassa latenza e modelli AI migliorati.
 Per saperne di più sulle infrastrutture digitali dell’Internet of Things scaricate il whitepaper.
Per saperne di più sulle infrastrutture digitali dell’Internet of Things scaricate il whitepaper.
[i] ABI Research, The Internet of Robotic Things, 3Q 2014.
[ii] Pieter Simoens, Mauro Dragone and Alessandro Saffiotti, The Internet of Robotic Things: A review of concept, added value and applications, International Journal of Advanced Robotic Systems, DOI 10.1177/1729881418759424, Jan-Feb 2018.